Robi2制作記録


2019/08/11
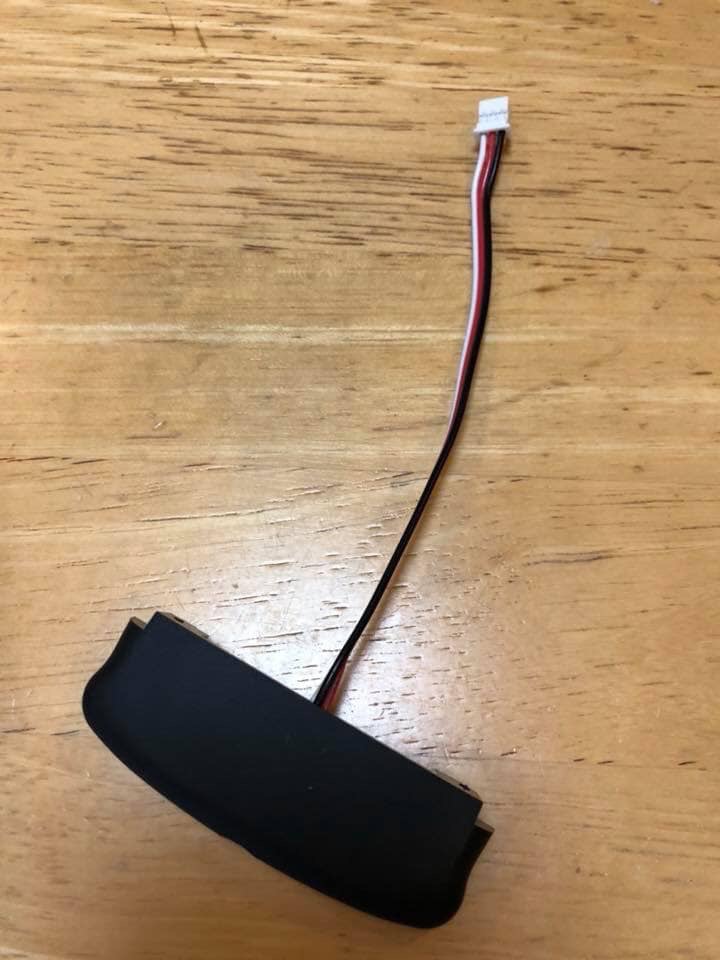
Robi2 第43号 「左肩サーボモーターのテストを行い、ID番号を書き込む」
前号で提供したサーボモーター(135mm)を左肩サーボモーターに接続し、動作確認とID番号の書き込みを行います。



2019/08/11
Robi2 第41号 「右肩サーボモーターのテストを行い、ID番号を書き込む」
前号で提供したサーボケーブル(70mm)を右肩サーボモーターに接続し、動作確認とID番号の書き込みを行います。






2019/08/11
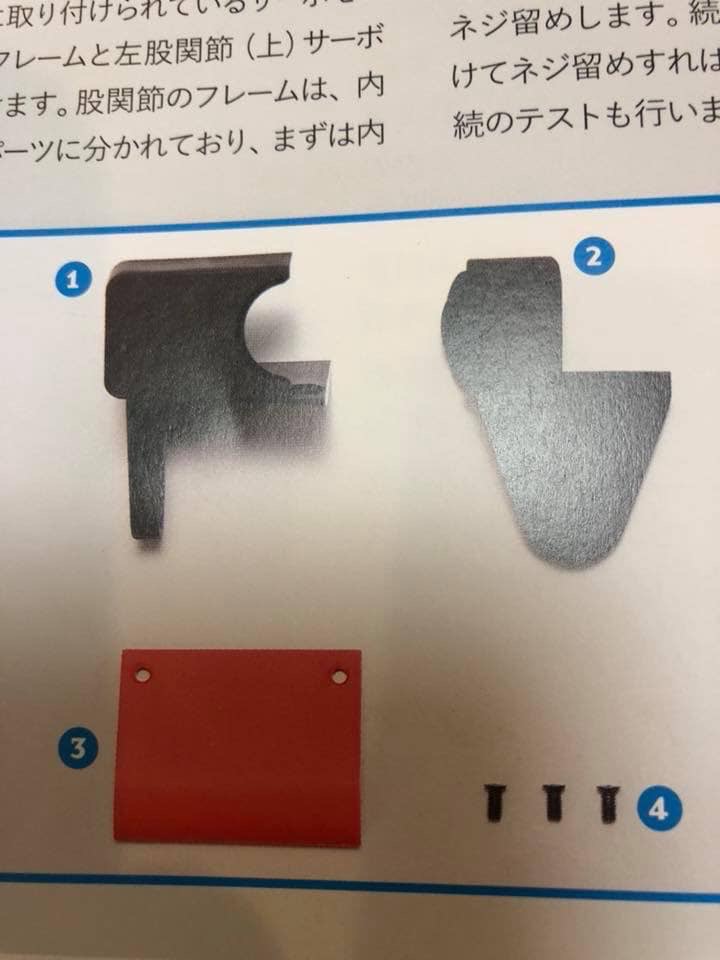
Robi2 第37号 「左股関節(上)サーボモーターのテストを行い、ID番号を書き込む」
35号で提供したサーボケーブル(135mm)を今号のサーボモーターに接続し、動作テストとID番号を書き込みを行います。

2018/08/11
Robi2 第36号 「左股関節(下)サーボモーターにID番号を書き込み、左脚に取り付ける
脚を前後に動かす股関節(下)サーボモーターにID番号を書き込み、これまで組み立ててきた左脚に取り付けます。